
事業紹介
弊社のロボットの研究・開発・販売体制
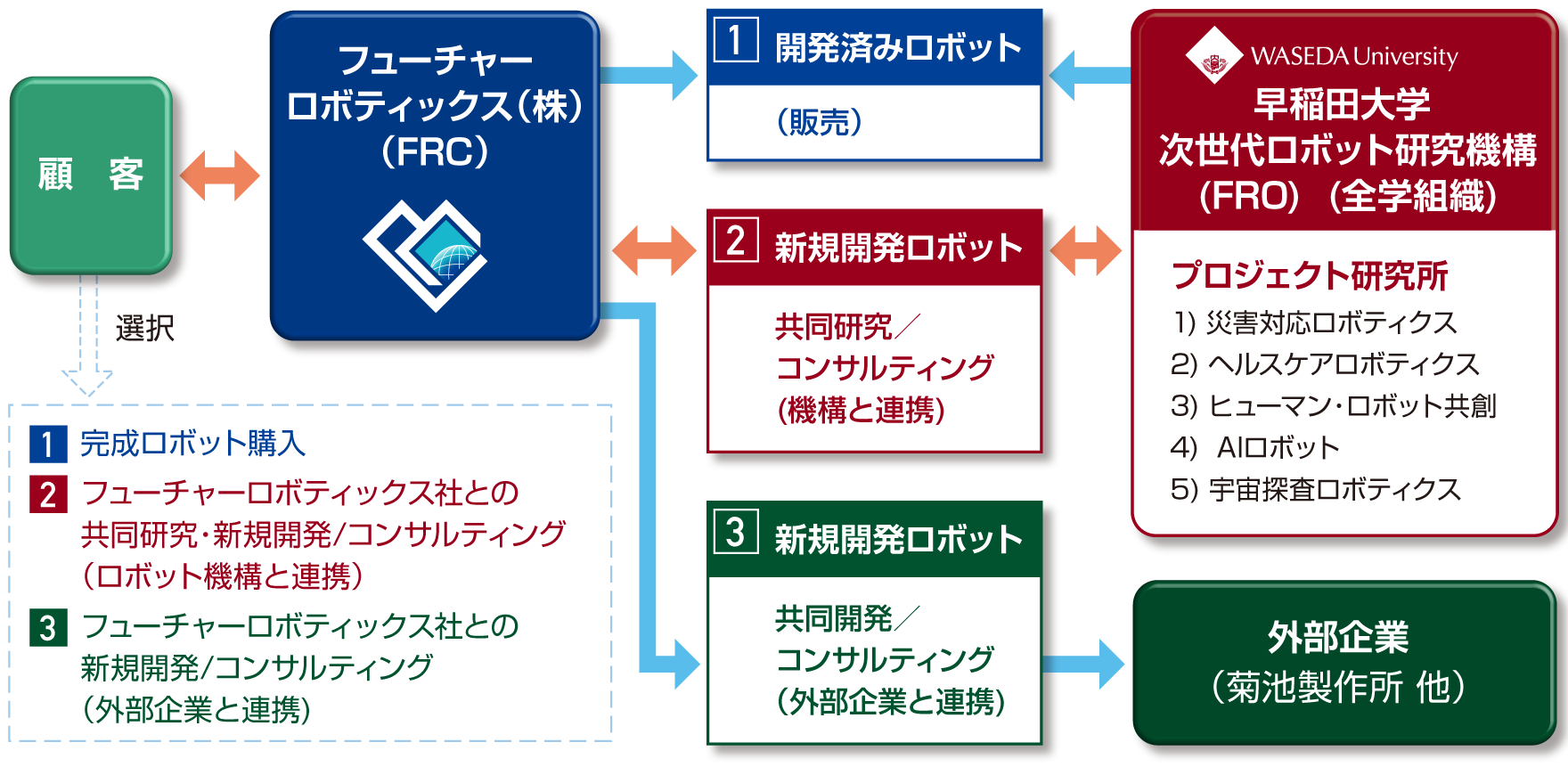
早稲田大学次世代ロボット研究機構の特徴
①世界初の二足歩行ロボット開発(1970年代)からの先端的ロボット研究・開発の歴史
②早稲田大学が中核研究として支援の横断的研究組織(約40名以上の研究者所属)
③学外各種大型研究費獲得。最近:内閣府のムーンショットプロジェクト(2021~)採択
(目標:2050年までにAIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現)
④海外の大学・研究所等と強い連携 (EU、米国、韓国、中国 他)
開発ロボット一例
| ①二足歩行ロボット | 膝が曲がらない状態での各種の歩行、感情表現(WABI AN、COBI AN) |
|---|---|
| ②オクトパス | 電動型・油圧型(災害復旧、瓦礫処理、消防作業、作業現場点検、遠隔操縦作業…) |
| ③WAMOT | 小型ロボット(インフラ点検、配線設置ロボット、災害場所の状態観測、放射線等の計測…) |
| ④管内移動ロボット | 空気圧型、(ガス管内点検、下水道管内点検、ピット内点検…) 遠隔移動型(管内を遠隔で移動) |
| ⑤楽器演奏ロボット | フルート演奏ロボット、サキソフォン演奏ロボット(開発途上) |
| ⑥食品加工ロボット | エンドエフェクターによる種々の加工(衛生仕様、防塵・防水仕様) |

オクトパス-
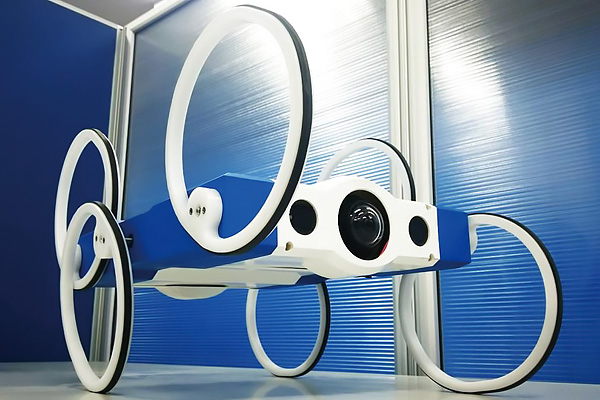
WAMOT
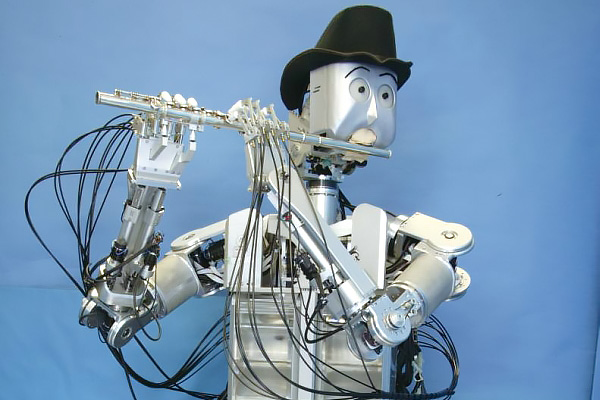
楽器演奏ロボット-
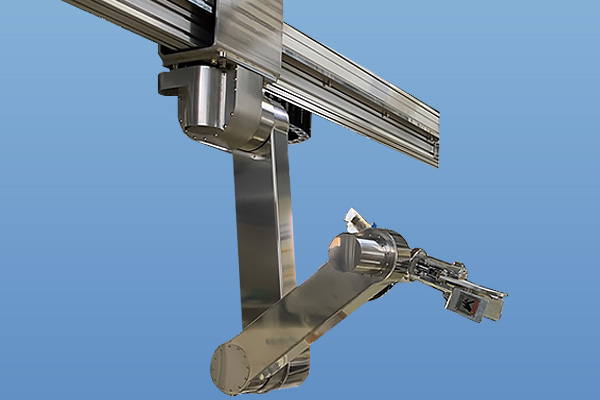
食品加工ロボット